Ned3 Pro robot on MuJoCo
/ 1 min read
Table of Contents
Role
Developer - Robotics Simulation Integration
Project Summary
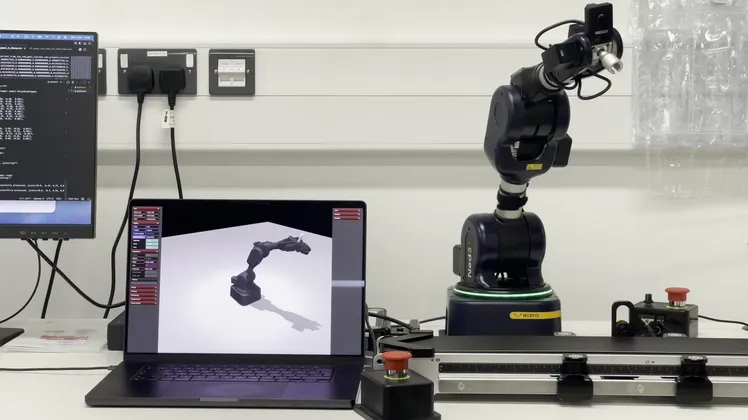
In this project, we ran the Ned3 Pro robot model on MuJoCo with a Docker-based bridge and live visualization. At the time of implementation, an official MuJoCo model for this robot was not available from the manufacturer. The official simulator path provided by Niryo was ROS1 + Gazebo.
Why This Path
- Easier and cleaner execution on macOS.
- Faster setup for testing and development workflows.
- It provides the base environment for starting future learning stages on powerful hardware.
Short Workflow
- Started the ROS1 simulation stack inside Docker.
- Bridged live joint states to MuJoCo on macOS host.
- Verified live synchronization in viewer and confirmed camera output stream.
Live Demo
Key Outcomes
- Demonstrated stable execution of Ned3 Pro on MuJoCo with a live bridge pipeline.
- Delivered live sync between simulation and visualization.
- Confirmed camera output availability during runtime.
- Built a practical foundation for hardware-accelerated learning phases in the next steps.
Skills
- Robotics
- ROS Integration
- Simulation Bridging