Ned3 Pro DRL Sim-to-Real Reaching
/ 2 min read
Table of Contents
Role
Developer - Deep Reinforcement Learning and Robotics Systems
Project Summary
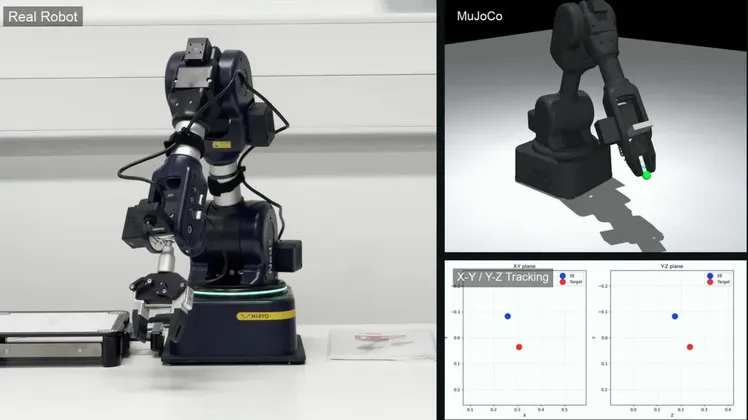
This project implements a sim-to-real robotic reaching pipeline for Ned3 Pro using Soft Actor-Critic with Hindsight Experience Replay (SAC+HER). The policy was trained as a goal-conditioned controller in simulation, then deployed to the real robot with synchronized monitoring through a MuJoCo digital twin and XY/YZ tracking plots.
What We Built
- Built a goal-conditioned DRL control loop that integrates state estimation, policy inference, and real-world robot execution.
- Implemented SAC+HER training and evaluation workflows for robust target-reaching behavior.
- Created synchronized monitoring views through a digital twin plus XY/YZ trajectory tracking plots.
- Structured workflows for repeatable experiments and quantitative analysis of tracking error and failure modes.
DRL Validation (SAC+HER)
- The SAC+HER policy achieved 90%+ task success in simulation.
- Validated end-to-end sim-to-real transfer with real robot runs and synchronized monitoring.
- Logged run behavior for tracking quality review and failure-mode analysis.
Demo Video
Caption: Normal-speed demo of the DRL pipeline where the learned controller runs on the real robot while synchronized MuJoCo digital-twin and trajectory monitoring are active.
The recording is shown at normal speed and represents the actual controller behavior during execution.
Key Outcomes
- Delivered a practical DRL baseline for sim-to-real reaching on Ned3 Pro.
- Demonstrated that SAC+HER can provide stable goal-conditioned control for transfer to hardware.
- Established a reusable evaluation flow for success rate, trajectory quality, and execution analysis.
Skills
- Reinforcement Learning
- Deep Reinforcement Learning (DRL)
- SAC + HER
- Robotics
- Python