Article: Nussbaum-PID Real-Hardware Deployment
/ 4 min read
Table of Contents
Article
Real-Hardware Deployment of a Nussbaum-Function PID Controller on a Current-Controlled Low-Cost Actuator via Hardware-Aware Optuna Tuning
Danial Zafaranchizadeh Moghaddam, Olga Tveretina, and Abolfazl Zaraki, University of Hertfordshire, 2026.
This page provides project context, visual summaries, headline metrics, citation information, and access notes for the published article.
Published article: Sensors 2026, 26(13), 4212
DOI: 10.3390/s26134212
PDF: MDPI PDF
Preprint archive: preprints.org/manuscript/202606.0331
The MDPI publication is the version of record and should be cited for scientific use. The preprint remains useful as a public history of the manuscript before journal publication.
One-Line Abstract
The paper shows that a direct Nussbaum-PID implementation degrades on a current-controlled low-cost actuator, then demonstrates that a hardware-aware Optuna-tuned variant recovers usable 300 s tracking by managing adaptation growth, actuation mapping, and saturation.
Project Summary
This work studies real-hardware deployment of a Nussbaum-function PID controller on a current-controlled low-cost manipulator actuator, using the Niryo NED3 Pro as the experimental platform.
The experiments focus on real-hardware trajectory tracking for Dynamixel ID 6 (Niryo J5 / distal wrist) in raw current-command control. The study isolates deployment-layer behaviour from whole-arm Coriolis, centrifugal, and gravity dynamics, then tests how friction, encoder quantization, current limits, communication latency, and low-speed nonlinearities affect an adaptive controller that works cleanly in paper-level or simulation settings.
Headline Result
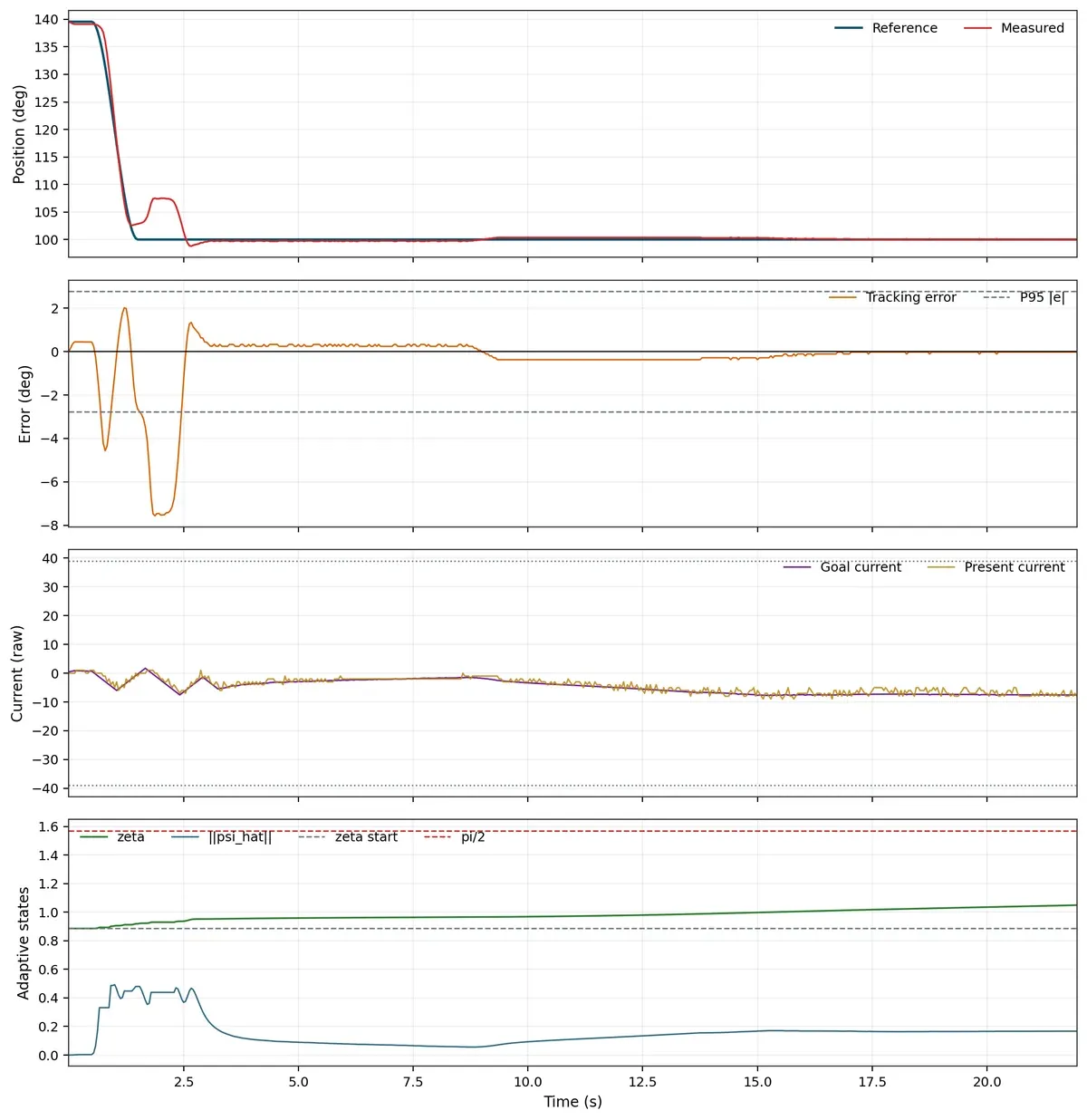
Enhanced Nussbaum-PID on Dynamixel ID 6 / Niryo J5, 300 s sinusoidal validation at 10 degree / 0.05 Hz:
| Metric | Result |
|---|---|
| MAE | 1.054 degree |
| RMSE | 1.283 degree |
| P95 |e| | 2.145 degree |
| Max |e| | 6.530 degree |
| Saturation | 1.2% |
The direct baseline implementation degrades to MAE = 10.476 degree and an internal command saturation ratio of 0.450 on the same actuator. The enhanced implementation reduces the internal command saturation ratio to 0.012 while preserving the Nussbaum-PID core.
The tuned implementation adds three practical deployment layers:
- adaptation-state regularization
- low-speed velocity-reference feedforward
- tail-region damping
Parameters were selected from a hardware-aware Optuna archive of 79 real-hardware trials, with unsafe runs rejected and the score jointly reflecting tracking quality, saturation, actuation activity, and bounded adaptation growth.
Publication and Citation
If you use this work, please cite the published Sensors article:
Zafaranchizadeh Moghaddam, D.; Tveretina, O.; Zaraki, A. Real-Hardware Deployment of a Nussbaum-Function PID Controller on a Current-Controlled Low-Cost Actuator via Hardware-Aware Optuna Tuning. Sensors 2026, 26(13), 4212. https://doi.org/10.3390/s26134212
BibTeX:
@article{zafaranchizadeh_moghaddam_2026_nussbaum_pid_hardware, title = {Real-Hardware Deployment of a Nussbaum-Function PID Controller on a Current-Controlled Low-Cost Actuator via Hardware-Aware Optuna Tuning}, author = {Zafaranchizadeh Moghaddam, Danial and Tveretina, Olga and Zaraki, Abolfazl}, journal = {Sensors}, volume = {26}, number = {13}, pages = {4212}, year = {2026}, publisher = {MDPI}, doi = {10.3390/s26134212}, url = {https://www.mdpi.com/1424-8220/26/13/4212}}Project-page reference:
Project page and full-code access notes:https://danielz.co.uk/projects/hardware-aware-nussbaum-pid/Visual Summary
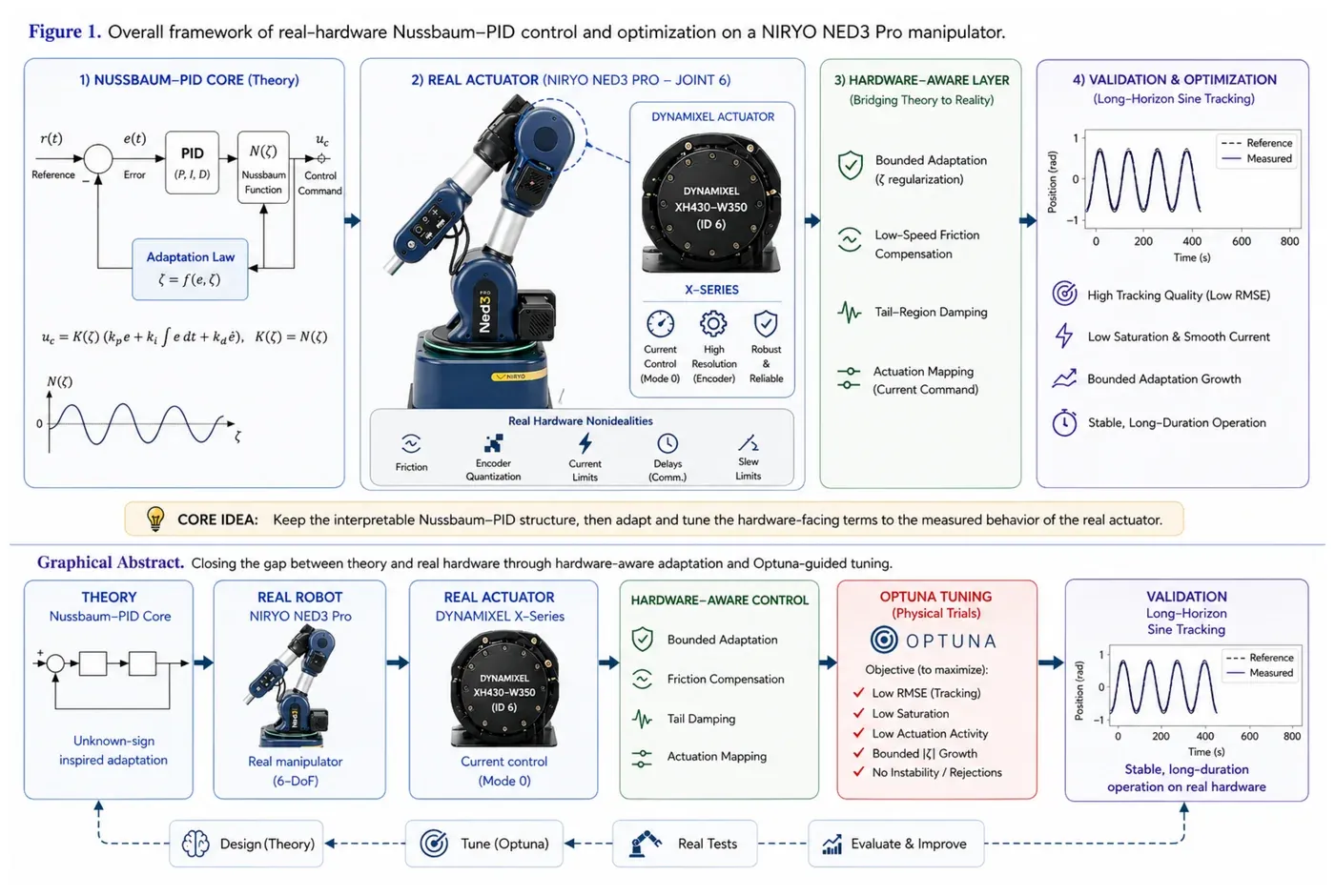
Graphical abstract: the article connects Nussbaum-PID theory, the NED3 Pro / Dynamixel actuator, the hardware-aware layer, Optuna-guided tuning, and long-horizon validation.
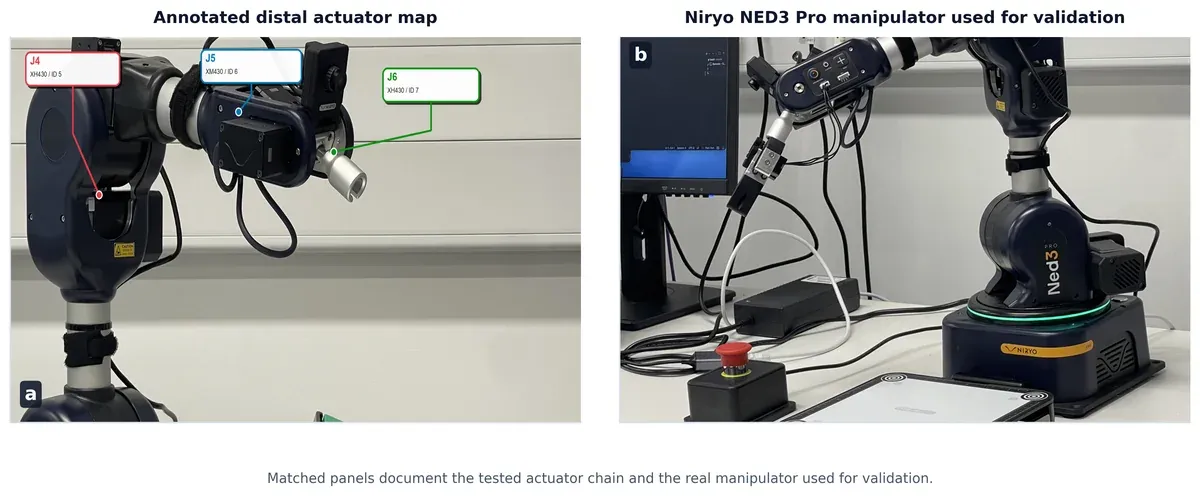
Hardware platform used for the single-joint current-mode validation on the Niryo NED3 Pro.
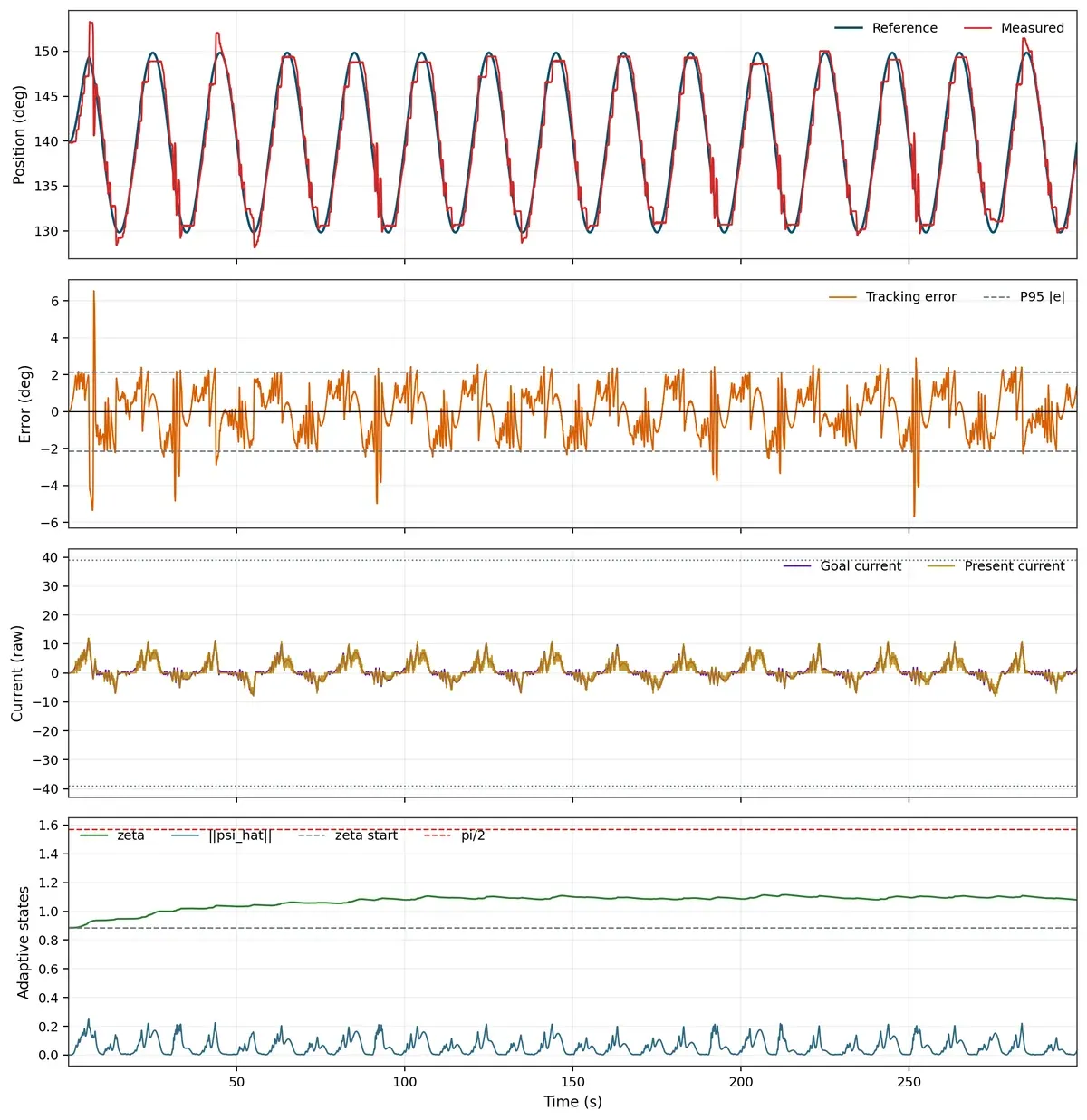
Headline 300 s validation run at 10 degree / 0.05 Hz.
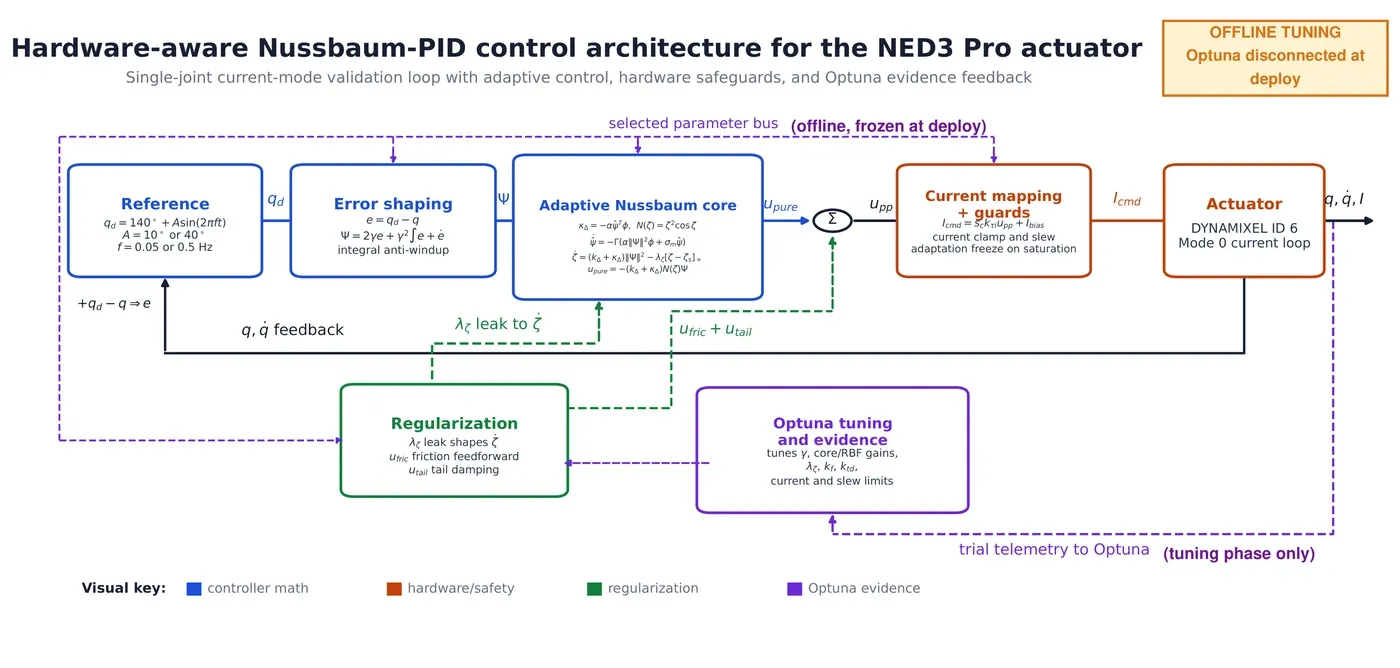
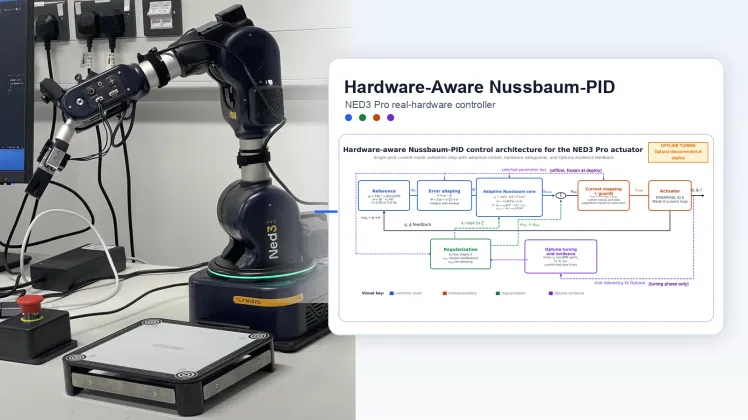
Hardware-aware Nussbaum-PID control architecture for the NED3 Pro actuator.
Key Figures
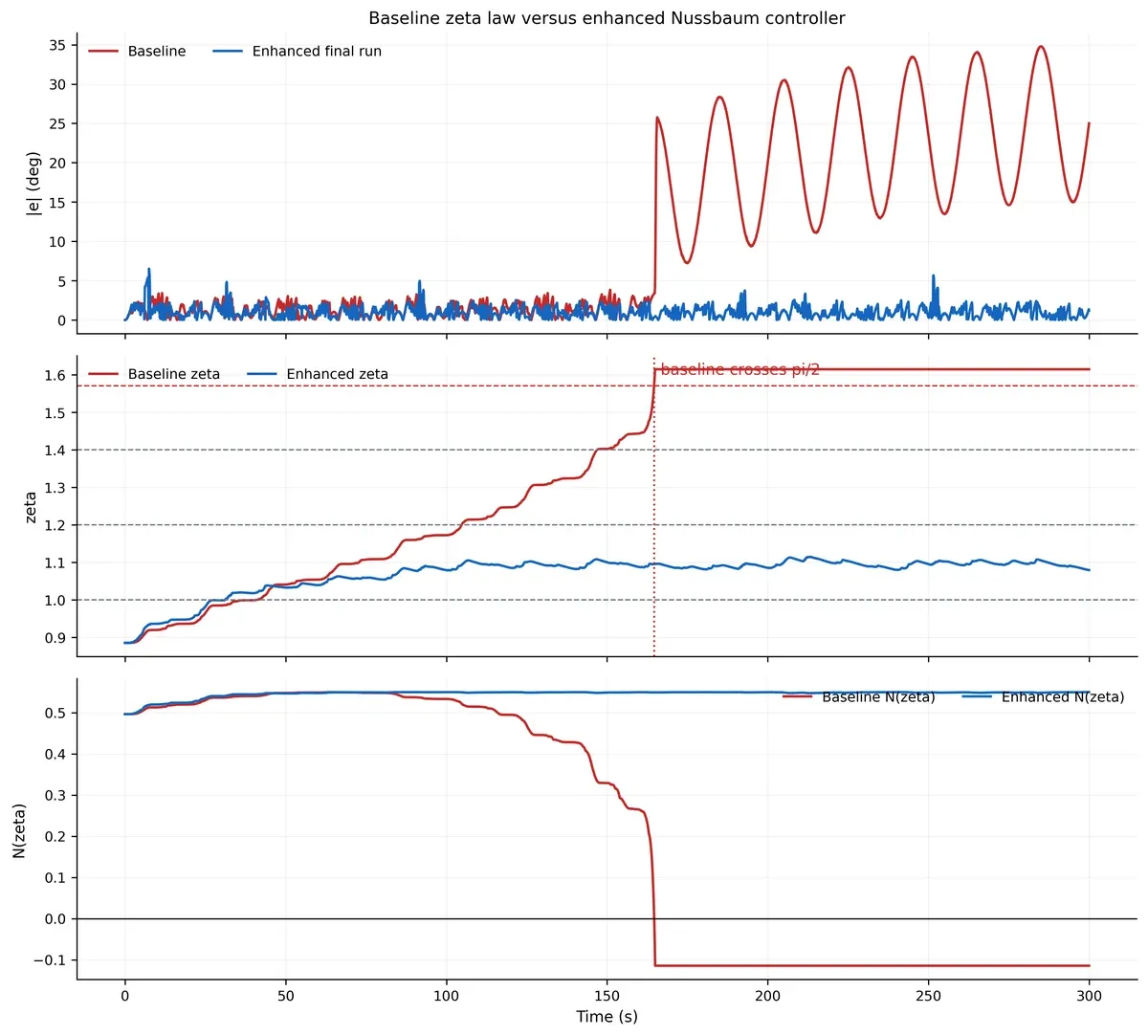
Baseline versus enhanced controller comparison.
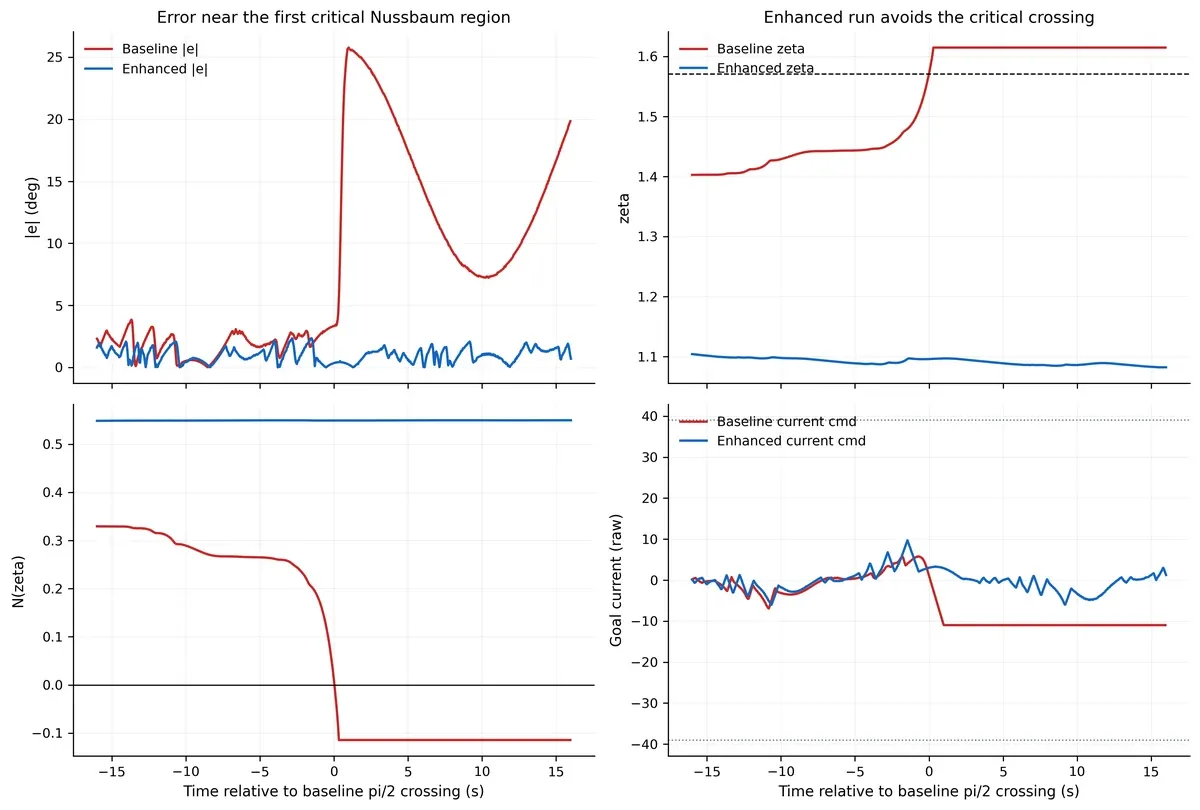
Critical-region zoom showing the failure mode around zeta approximately pi over 2.
Multi-envelope step-response evidence for the 40 degree condition.
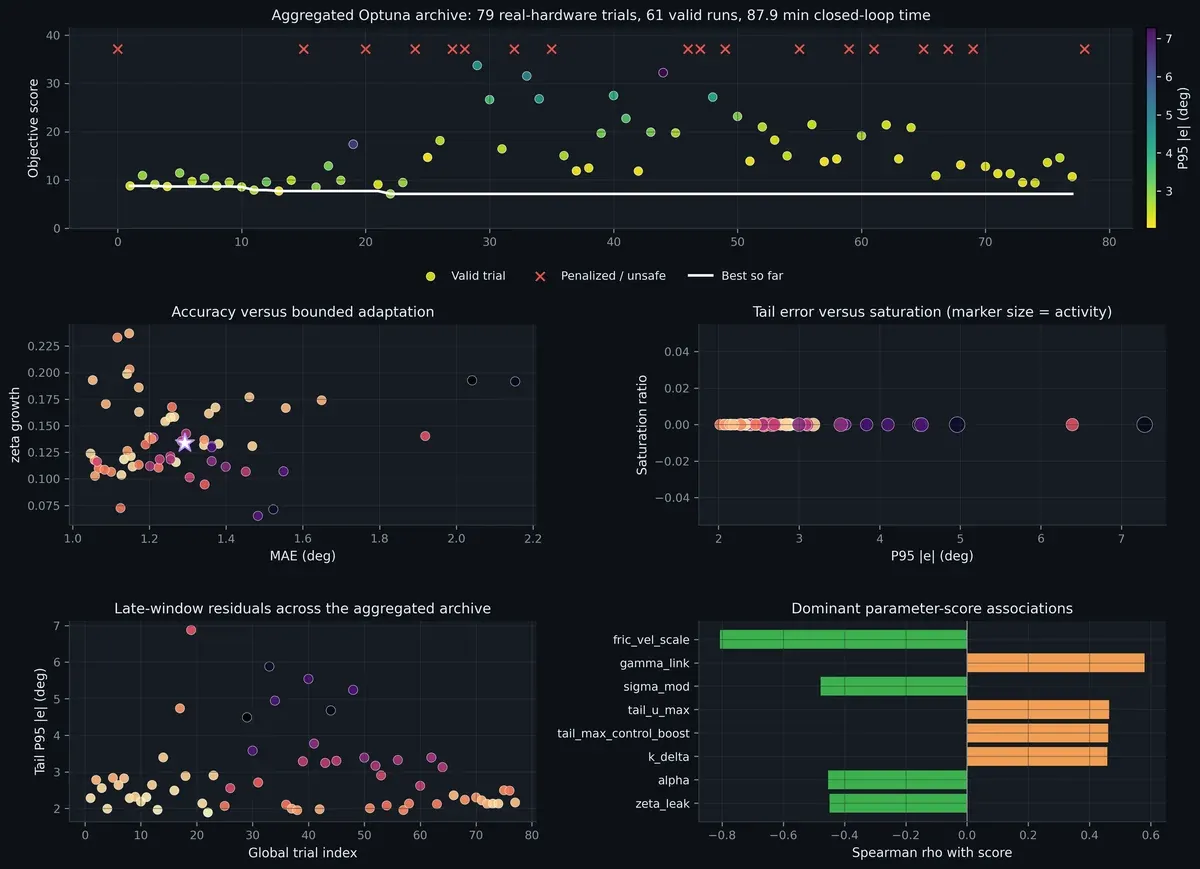
Optuna search dashboard used to summarize tuning progress.
Code and Access
The public companion repository keeps the project file names, figures, tables, selected public artefacts, and README descriptions visible for manuscript context. Python implementation bodies are not included in the public copy.
Public repository:
For full code access, reviewer material, or supplementary implementation details, please email:
- Danial Zafaranchizadeh Moghaddam —
danial.za@outlook.com - Abolfazl Zaraki —
a.zaraki@herts.ac.uk
Please include your affiliation, intended use, and whether the request is for review, reproduction, or collaboration.
Experimental Scope
The validated envelope includes:
- 10 degree and 40 degree sinusoids at 0.05 Hz and 0.5 Hz
- 15 degree and 40 degree step responses
- Bandwidth-limit characterization at 1.5-3 Hz
- Optuna-guided controller-parameter tuning and ablation analysis
Beyond the validated low-frequency envelope, the bandwidth probes show where the low-cost mechanical and sensing stack becomes the dominant limitation.
Citation and Reuse
If you use the figures, experimental methodology, or any implementation material shared with you by email, please cite the published Sensors article and acknowledge the project page when it is useful for code-access context.
The public GitHub repository is a companion snapshot for figures, tables, README descriptions, and manuscript context. Full implementation access is handled by request so that review, reproduction, and collaboration use can be tracked properly.